DMD0517
CTDYNVEL - CTRIO Run Dynamic Velocity Mode
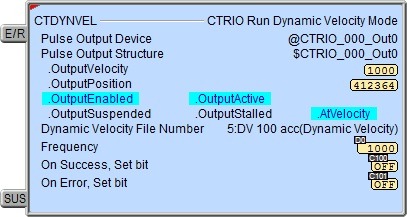
The CTRIO Run Dynamic Velocity Mode (CTDYNVEL) instruction is used to load and run one of the pre-configured Dynamic Velocity Profiles in the System Configuration for the CTRIO module and put the Pulse Output Device into the Dynamic Velocity Mode, allowing successive velocities to be easily commanded. Once in Dynamic Velocity Mode, velocities are commanded by simply changing the Frequency value. The velocities will execute using the parameters defined by the loaded pulse profile.
The red triangle in the upper left corner indicates the CTRIO Run Dynamic Velocity Mode (CTDYNVEL) is a Fully Asynchronous instruction.
Note: The CTDYNVEL instruction can be used with both the CTRIO and CTRIO2 modules.

Inputs:
The first input (E/R) in the Enable / Reset input. When this input logic is ON the Pulse Output Device is placed in the "Dynamic Velocity Mode", the specified Dynamic Velocity File Number will be loaded, the current position value will be set to 0 (e.g. .OutputPosition = 0) and the Output will be enabled (.OutputEnabled = ON).
 The
second input (SUS) is the Suspend input. When SUS
input comes ON the CTRIO will abruptly stop emitting output pulses. When
SUS input returns to OFF the CTRIO
will abruptly start emitting the remaining output pulses.
The
second input (SUS) is the Suspend input. When SUS
input comes ON the CTRIO will abruptly stop emitting output pulses. When
SUS input returns to OFF the CTRIO
will abruptly start emitting the remaining output pulses.
Parameters:
Note: Use the F9 key (Element Browser) or Down-Arrow key (Auto-Complete) at any time to see a complete list of the memory locations that are valid in the current field of the instruction.
 Pulse Output Device -
designates which of the pre-configured CTRIO Devices to interact with.
Before this instruction can select a Pulse
Output Device, a CTRIO Device must be configured with at least
one of its output channels setup for Pulse/Direction
or CW/CCW pulse output mode.
Pulse Output Device -
designates which of the pre-configured CTRIO Devices to interact with.
Before this instruction can select a Pulse
Output Device, a CTRIO Device must be configured with at least
one of its output channels setup for Pulse/Direction
or CW/CCW pulse output mode.
Part of the configuration for a device is assigning a name to the device. It is that name which will show up in the Pulse Output Device selection drop-down menu. For more information on configuring CTRIO devices go to the Module Configuration Section under System Configuration.
Note: no devices available - indicates that there are no CTRIO Devices that have been pre-configured to perform this instruction.
Note: create module - Selecting this will immediately pull up the System Configuration and allow the creation of a new module (see Module Configuration Section under System Configuration.)
Pulse Output Structure -
Dynamic Velocity File Number
- designates which Dynamic Velocity Profile to Run.
The profile can be specified in one of the following three ways:
Fixed File - displays a list of the Dynamic Velocity Profiles that were read from the CTRIO module during the Module Configuration phase. Select the desired profile from the list. Available Profiles:
|
PROFILE (Silver text indicates the profile cannot be used with CTDYNVEL) |
CTRIO |
CTRIO2 |
|
Trapezoid |
|
|
|
S-Curve |
|
|
|
Symmetrical S-Curve |
|
|
|
Dynamic Positioning |
|
|
|
Dynamic Velocity |
Yes |
Yes |
|
Home Search |
|
|
|
Free Form |
|
|
|
Dynamic Positioning Plus (CTRIO2) |
|
|
|
Trapezoid Plus (CTRIO2) |
|
|
|
Trapezoid w/Limits (CTRIO2) |
|
|
Variable File Number - designates a location in the Do-more controller where the Dynamic Velocity Profile number will be read. This can be any readable numeric location.
Constant File Number - specify the Dynamic Velocity Profile number as a constant number from 1 to 255.
Frequency - specifies the Frequency for the Dynamic Velocity Profile. This can be any positive or negative constant value in the range of 0 to 25000 for the CTRIO, or the range of 0 to 250000 for the CTRIO2, or any readable numeric location.
On Success - designates which of the following actions to take if the CTRIO Run Dynamic Velocity Mode operation is successful.
Note: On Success is not indicated upon the every Frequency value change. While the E/R (Enable / Reset) input is ON, the Pulse Output Device is considered in the "Dynamic Velocity Mode". When the E/R (Enable / Reset) input goes OFF, this is when On Success will be indicated.
SET BIT - The specific BIT location will turn OFF when the CTRIO Run Dynamic Velocity Mode (CTDYNVEL) instruction is first enabled, and then SET ON when the instruction is disabled, if the operation is successful. This value can be any writable bit location.
JMP to Stage - JMP to the specified Stage. The target Stage must be in the same Program code block as the CTRIO Run Dynamic Velocity Mode (CTDYNVEL) instruction, you cannot specify a Stage in a different Program code block. This selection will function like a standalone Jump to Stage instruction. Click here for more information on the Jump To Stage instruction.
On Error - designates which
of the following two actions to take if the CTRIO Run Dynamic Velocity
Mode operation is unsuccessful. For example if the specified Dynamic Velocity
Profile is missing, or the specified Profile number is the wrong type
for a Pulse Output.
SET BIT - The specific BIT location will turn OFF when the CTRIO Run Dynamic Velocity Mode (CTDYNVEL) instruction is first enabled, and then SET ON if the operation is unsuccessful. This value can be any writable bit location.
JMP to Stage - JMP to the specified Stage. The target Stage must be in the same Program code block as the CTRIO Run Dynamic Velocity Mode (CTDYNVEL) instruction, you cannot specify a Stage in a different Program code block. This selection will function like a standalone Jump to Stage instruction. Click here for more information on the Jump To Stage instruction.
Note: any time the On Error condition occurs, the CTRIO generates an Error Code that can be read in the <Module Name>.ErrorCode (Module Name is the name assigned to the CTRIO in the Module Configuration). The List of Error Code values (in decimal) follows:
|
Error Code |
Description |
|
000 |
No Error |
|
100 |
Specified command code is unknown or unsupported |
|
101 |
File number not found in the file system |
|
102 |
File type is incorrect for specified output function |
|
103 |
Profile type is unknown |
|
104 |
Specified input is not configured as a limit on this output |
|
105 |
Specified limit input edge is out of range |
|
106 |
Specified input function is unconfigured or invalid |
|
107 |
Specified input function number is out of range |
|
108 |
Specified preset function is invalid |
|
109 |
Preset table is full |
|
110 |
Specified Table entry is out of range |
|
111 |
Specified register number is out of range |
|
112 |
Specified register is an unconfigured input or output |
|
113 |
Specified output is not configured as a limit on this output |
|
114 |
Specified preset function invalid in PLS table |
|
115 |
Specified PLS function invalid in preset table |
|
116 |
PLS table entries overlap |
|
117 |
Attempted to use axis function when pulse output is not in Axis Mode |
|
118 |
Specified output isn't a pulse output |
Status Display:
The Status display of the CTRIO Run Dynamic Velocity Mode (CTDYNVEL) instruction shows:
Values: .OutputVelocity, .OutputPosition, Frequency, Dynamic Velocity File Number
Highlights: .OutputEnabled, .OutputActive, .OutputSuspended, .OutputStalled, .AtVelocity bits
ON/OFF: On Success, On Error bits
CTRIO Structure Field Care-Abouts:
The following is a list of the"dot" fields of the CTRIO structure that are programmatically used with the CTRIO Run Dynamic Velocity Mode (CTDYNVEL) instruction. To see a complete listing of all CTRIO structures and members, goto the Project Browser --> Configuration --> Memory --> I/O --> Specialty.
COLOR KEY
Blue: CTRIO Input
Maroon: CTRIO Output
Black: CTRIO Module
Silver: Not used for this instruction
Note: The red "x" is the digit 0, 1, 2, or 3.
|
CTRIO_000 |
CTDYNVEL |
||
|
MEMBER* |
R/W |
TYPE |
DESCRIPTION |
|
_CxFx.AtResetValue |
|
|
|
|
_CxFx.CaptureComplete |
|
|
|
|
_CxFx.CapturedStart |
|
|
|
|
_CxFx.CountCaptured |
|
|
|
|
_CxFx.EnableCapture |
|
|
|
|
_CxFx.fReg1 |
|
|
|
|
_CxFx.fReg2 |
|
|
|
|
_CxFx.iReg1 |
|
|
|
|
_CxFx.iReg2 |
|
|
|
|
_CxFx.Output |
|
|
|
|
_CxFx.Reset |
|
|
|
|
_CxFx.Timeout |
|
|
|
|
_Outx.AtPosition |
|
|
|
|
_Outx.AtVelocity |
RO |
Bit |
If using CTRIO2: ON when CTRIO2 has reached Frequency |
|
_Outx.Direction |
RO |
Bit |
If using CTRIO2: ON when motor is moving counter-clockwise |
|
_Outx.EnableOutput |
|
|
|
|
_Outx.GotoPosition |
|
|
|
|
_Outx.Output |
|
|
|
|
_Outx.OutputActive |
RO |
Bit |
ON when CTRIO output is generating pulses |
|
_Outx.OutputEnabled |
RO |
Bit |
ON when E/R input comes ON which enables CTRIO output |
|
_Outx.OutputPosition |
RO |
Dword |
Output raw position |
|
_Outx.OutputStalled |
RO |
Bit |
ON if CTRIO output cannot generate pulses because its scantime is too high |
|
_Outx.OutputSuspended |
RO |
Bit |
ON when the SUS input comes ON which suspends the CTRIO output |
|
_Outx.OutputVelocity |
RO |
Dword |
If using CTRIO2: Current pulses per second rate being output by the CTRIO2 |
|
_Outx.TableComplete |
|
|
|
|
.ErrorCode |
RO |
Word |
Last CTRIO error code |
|
.Mode |
RO |
Word |
Indicates CTRIO mode: 2 = RUN; 1 = PROGRAM |
|
.ScanTime |
RO |
Word |
CTRIO scantime in microseconds |
|
.MaxScanTime |
RO |
Word |
Maximum CTRIO scantime in microseconds |
|
.InputState |
RO |
Word |
Upper byte is not used. Lower byte's nibbles indicate CTRIO's channel's input's state in order: .ChxD, .ChxC, .ChxB, .ChxA. It is a composite of these members |
|
.OutputState |
RO |
Word |
Each nibble indicates a CTRIO output configuration and state: .OutxType, .OutxDiscOn, .OutxDiscEnabled, .OutxPulseActive. It is a composite of these members |
|
.ChxA |
RO |
Bit |
ON when CTRIO Channel x Input A is ON |
|
.ChxB |
RO |
Bit |
ON when CTRIO Channel x Input B is ON |
|
.ChxC |
RO |
Bit |
ON when CTRIO Channel x Input C is ON |
|
.ChxD |
RO |
Bit |
ON when CTRIO Channel x Input D is ON |
|
.OutxType |
RO |
Bit |
Configuration: ON if CTRIO output x is configured for pulse output |
|
.OutxDiscOn |
RO |
Bit |
Status: ON if CTRIO output x logic is ON (if output x is enabled then the physical output will also be ON) |
|
.OutxDiscEnabled |
RO |
Bit |
Configuration: ON if CTRIO output x is configured for discrete output |
|
.OutxPulseActive |
RO |
Bit |
Status: ON if CTRIO output x is generating pulses |
See Also:
CTDYNVEL - CTRIO Run Dynamic Velocity Mode
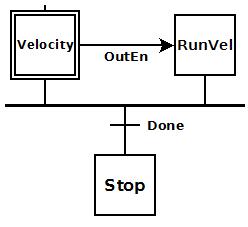 To the right is a stage diagram of a simple sequence
control that would run a motor at any number of different velocities.
To the right is a stage diagram of a simple sequence
control that would run a motor at any number of different velocities.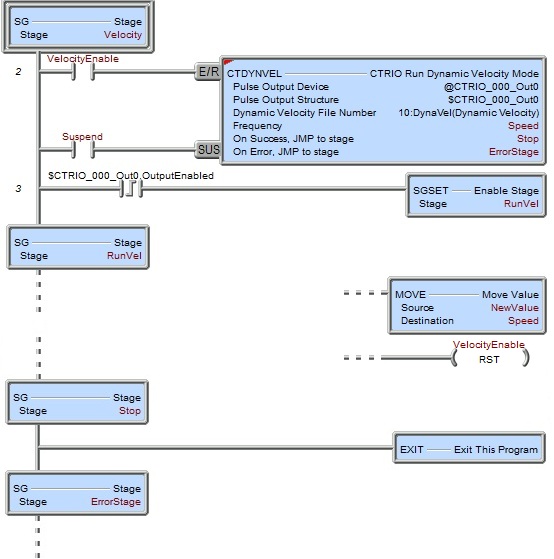 To the right is the ladder equivalent of the above
stage diagram that uses the CTDYNVEL instruction which will run a stepper
motor attached to the CTRIO's pulse output at any number of specified
velocities using a predetermined movement profile.
To the right is the ladder equivalent of the above
stage diagram that uses the CTDYNVEL instruction which will run a stepper
motor attached to the CTRIO's pulse output at any number of specified
velocities using a predetermined movement profile.