Topic: DMD0139
PIDINIT - Set PID Tuning Constants
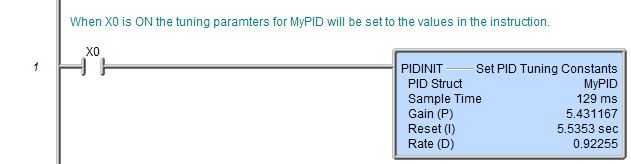
The Set PID Tuning Constants (PIDINIT) instruction is used to initialize the runtime parameters of the designated PID loop.
Note: to use variables to set the tuning constants use the Move Value instruction referencing the individual PID structure members, for example MyPID.Gain, MyPID.SampleTime, etc..
Note: at the conclusion of a successful Autotune process the user can elect to automatically create a PIDINIT instruction.
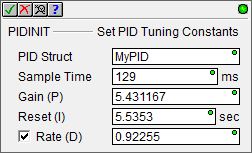
Parameters:
Note: Use the F9 key (Element Browser) or Down-Arrow key (Auto-Complete) at any time to see a complete list of the memory locations that are valid in the current field of the instruction.
PID Reference - designates the PID loop structure which will receive the tuning values. This can be any existing PID loop structure.
Sample Time (ms) - designates the Sample Time (in milliseconds). This can be any constant value greater than or equal to 1.
Gain (P) - designates the Gain (Proportional) value. This can be any constant value.
Reset (I) - designates the Reset (Integral) value. This can be any constant value.
Rate (D) - if enabled, designates the Reset (Derivative) value. This can be any constant value.
Eliminating Proportional, Integral or Derivative Action - It is not always necessary to run a full three mode PID control loop. Most loops require only the PI terms or just the P term. Parts of the PID equation may be eliminated by choosing appropriate values for the gain, reset and rate, thereby yielding a P, PI, PD, I and even an ID and a D loop.
Eliminating Gain (Proportional) Action - Although rarely done, the effect of proportional term on the output may be eliminated by setting the value to 0.
Eliminating Reset (Integral) Action - The effect of integral action on the output may be eliminated by setting the Reset value to 0.
Eliminating Rate (Derivative) Action - The effect of derivative action on the output may be eliminated by setting the value to 0.
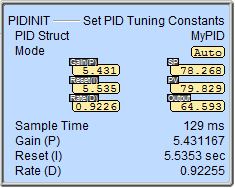
Status Display:
When the ladder status is ON (Debug-> All Status On) the Set PID Tuning Constants instruction displays the referenced PID loop's most pertinent values.
See Also:
PIDINIT - Set PID Tuning Constants
Rung Example: