Topic: DMD0554
CTRIO Module Configuration - Pulse Profiles
Pulse Profiles Overview:
Each Pulse Profile is a behavior model for a CTRIO pulse output. These pulse profiles tables are utilized by various Do-more CTRIO instructions for a particular CTRIO pulse output. They can be used only with the following CTRIO output configurations:
Pulse (Step/Dir)
Pulse (CW/CCW)
Some of the pulse profiles can be used in conjunction with the following CTRIO input configurations:
Quad Counter
Limit Out 0 / Limit Out 2
There are 10 types of pulse profiles available:
Trapezoid - asymmetrical linear trapezoidal movement to a total number of pulses. Used with the CTRUNPOS (CTRIO Run Position Mode) instruction. Click here for help with Trapezoid pulse profile.
S-Curve - S-shaped movement to a total number of pulses. Used with the CTRUNPOS (CTRIO Run Position Mode) instruction. Click here for help with S-Curve pulse profile.
Symmetrical S-Curve - symmetrical S-shaped movement to a total number of pulses. Used with the CTRUNPOS (CTRIO Run Position Mode) instruction. Click here for help with Symmetrical S-Curve pulse profile.
Dynamic Positioning - symmetrical linear trapezoidal movement where any number of positions can be specified on-the-fly. Used with the CTDYNPOS (CTRIO Run Dynamic Position Mode) instruction. Click here for help with Dynamic Positioning pulse profile.
Dynamic Velocity - asymmetrical linear trapezoidal movement where any number of velocities can be specified on-the-fly. Used with the CTDYNVEL (CTRIO Run Dynamic Velocity Mode) instruction. Click here for help with Dynamic Velocity pulse profile.
Home Search - movement profile used to find a home position utilizing a CTRIO input. Used with the CTRUNPOS (CTRIO Run Position Mode) instruction. Click here for help with Home Search pulse profile.
Free Form - custom movement profile allowing any number of steps each having a number of pulses to be output at a specified frequency. Used with the CTRUNPOS (CTRIO Run Position Mode) instruction. Click here for help with Free Form pulse profile.
Dynamic Positioning Plus (CTRIO2) - asymmetrical linear trapezoidal movement where any number of positions can be specified on-the-fly with the additional option of using a quadrature encoder attached to the CTRIO2 input channel to provide the position. Used with the CTDYNPOS (CTRIO Run Dynamic Position Mode) instruction. Click here for help with Dynamic Positioning Plus (CTRIO2) pulse profile.
Trapezoid Plus (CTRIO2) - asymmetrical linear trapezoidal movement to a run-time-provided position with the additional option of using a quadrature encoder attached to the CTRIO2 input channel to provide the position. Used with the CTRUNPOS (CTRIO Run Position Mode) instruction. Click here for help with Trapezoid Plus (CTRIO2) pulse profile.
Trapezoid w/Limits (CTRIO2) - asymmetrical linear trapezoidal movement to a deceleration trigger (a CTRIO2 input) and then to a stop trigger (a position or a CTRIO2 input) with the additional option of using a quadrature encoder attached to the CTRIO2 input channel to provide the position. Used with the CTRUNPOS (CTRIO Run Position Mode) instruction. Click here for help with Trapezoid w/Limits (CTRIO2) pulse profile.
Creating Pulse Profiles:
To get to the CTRIO Module Configuration - Pulse Profiles dialog:
Follow this menu path: PLC --> System Configuration --> Module Configuration(s). This pulls up the System Configuration dialog.
Double-click on the CTRIO to configure. This pulls up the Edit CTRIO/CTRIO2 Configuration dialog.
Press the <Pulse Profiles> button.
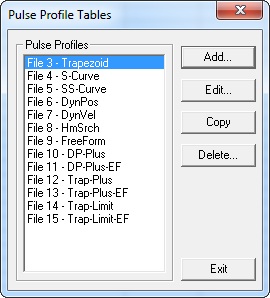 Pulse Profiles box -
This box lists all the pulse profiles previously created.
Pulse Profiles box -
This box lists all the pulse profiles previously created.
To create a new pulse profile, click the <Add> button. This will pull up the Edit Pulse Profile (shown below).
To edit an existing pulse profile, click on the pulse profile in the Pulse Profiles box list and then click the <Edit> button. This will pull up the Edit Pulse Profile (shown below).
To copy an existing pulse profile, click on the pulse profile to copy in the Pulse Profiles box list and then click on the <Copy> button. An identical pulse profile will appear in the list.
To delete an existing pulse profile, click on the pulse profile to delete in the Pulse Profiles box list and then click the <Delete> button.
Edit Pulse Profile:
The Edit Pulse Profile is where all the various types of pulse profiles are created and edited.
Profile Info (box) - contains the information that defines the type of pulse profile.
Name - this is an optional text strictly for documentation
Profile Type - in this window is where the pulse profile type is chosen
File Stats (box) - contains file information
File Number - this is a number automatically assigned
Total Entries - the total number of entries in a particular pulse profile block
Blocks Used - there are a total of 255 blocks free, and this shows how many blocks a particular pulse profile has utilized.
Calculate Profile (button) - when the parameters are entered, pressing this button causes the graphic to be redrawn reflecting the new parameters
Graphic - a graphical representation of the parameters. Some pulse profiles do not have a graphic.
Below the graphic - this section is changes dynamically depending upon which type of pulse profile is selected
Pulse Profiles:
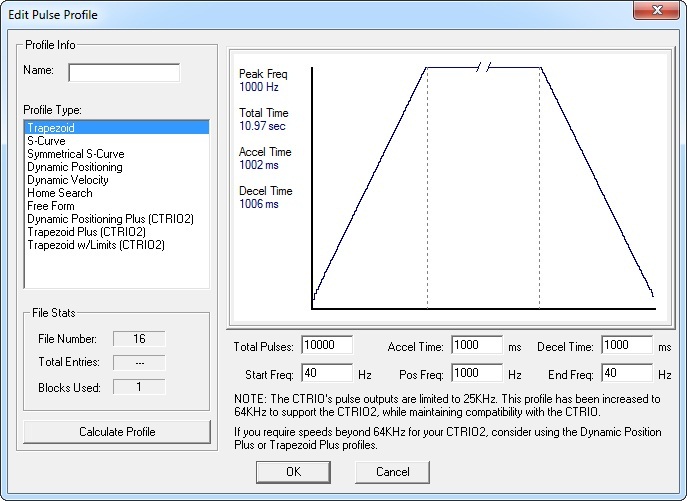
Trapezoid
By default, when adding a new pulse profile, the
trapezoid pulse profile comes up. This profile defines an asymmetrical
(i.e. acceleration & deceleration can be different) linear trapezoidal
movement to a total number of pulses and is used with the CTRUNPOS
(CTRIO Run Position Mode) instruction. It has the following parameters:
Total Pulses - total amount of pulses (i.e. the distance) that will be output when this pulse profile is executed
Start Freq - starting frequency
Accel Time - amount of time desired for acceleration to get to the Pos Freq
Pos Freq - positioning frequency. The maximum frequency to be output
Decel Time - the amount of time desired for deceleration to get to the End Freq
End Freq - ending frequency
Once all the parameters are entered, pressing the <Calculate Profile> button will cause the graphic to be redrawn to represent the new parameters.
S-Curve
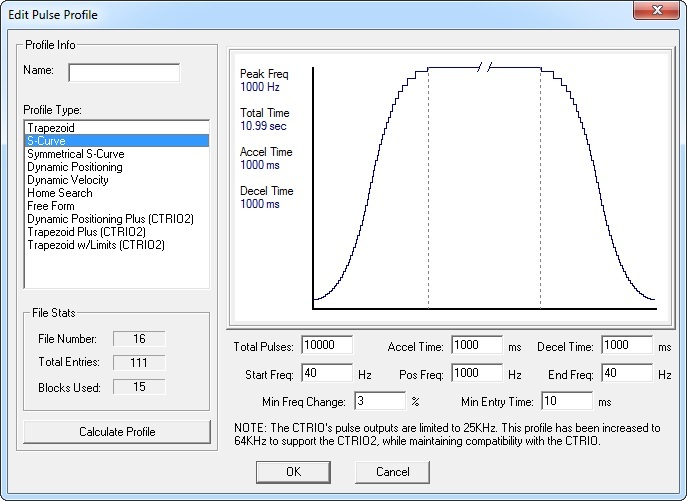 This profile defines an asymmetrical (i.e. acceleration
& deceleration can be different) S-shaped movement to a total number
of pulses and is used with the CTRUNPOS
(CTRIO Run Position Mode) instruction. This type of movement is
commonly used for motors that are sensitive to sudden changes in position
or velocity, resulting in vibrations or jerky reactions. It provides a
more controlled acceleration and deceleration period than the trapezoidal
profiles by increasing transition times. It has the following parameters:
This profile defines an asymmetrical (i.e. acceleration
& deceleration can be different) S-shaped movement to a total number
of pulses and is used with the CTRUNPOS
(CTRIO Run Position Mode) instruction. This type of movement is
commonly used for motors that are sensitive to sudden changes in position
or velocity, resulting in vibrations or jerky reactions. It provides a
more controlled acceleration and deceleration period than the trapezoidal
profiles by increasing transition times. It has the following parameters:
Total Pulses - total amount of pulses (i.e. the distance) that will be output when this pulse profile is executed
Start Freq - starting frequency
Accel Time - amount of time desired for acceleration to get to the Pos Freq
Pos Freq - positioning frequency. The maximum frequency to be output
Decel Time - the amount of time desired for deceleration to get to the End Freq
End Freq - ending frequency
Min Freq Change - the amount of calculated frequency change that must take place before stepping to the next frequency
Min Entry Time - the amount of time spent in each step
Once all the parameters are entered, pressing the <Calculate Profile> button will cause the graphic to be redrawn to represent the new parameters.
Symmetrical S-Curve
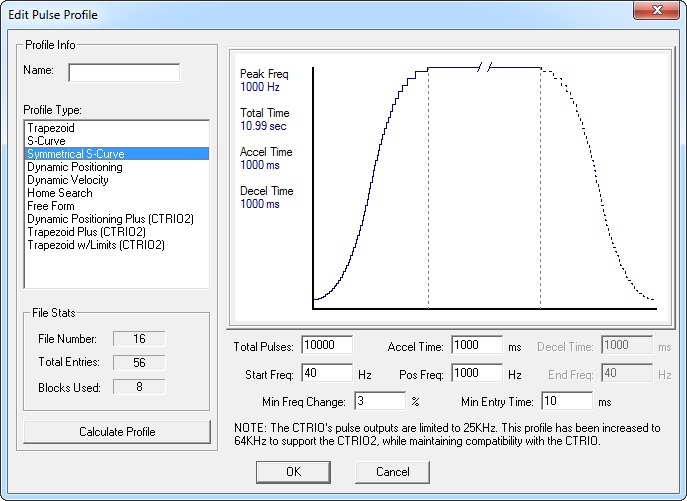
This profile defines a symmetrical (i.e. acceleration & deceleration are the same) S-shaped movement to a total number of pulses and is used with the CTRUNPOS (CTRIO Run Position Mode) instruction. This type of movement is commonly used for motors that are sensitive to sudden changes in position or velocity, resulting in vibrations or jerky reactions. It provides a more controlled acceleration and deceleration period than the trapezoidal profiles by increasing transition times. It has the advantage over the S-Curve in that it uses takes less space in the CTRIO for storage. It has the following parameters:
Total Pulses - total amount of pulses (i.e. the distance) that will be output when this pulse profile is executed
Start Freq - starting frequency
Accel Time - amount of time desired for acceleration to get to the Pos Freq
Pos Freq - positioning frequency. The maximum frequency to be output
Min Freq Change - the amount of calculated frequency change that must take place before stepping to the next frequency
Min Entry Time - the amount of time spent in each step
Once all the parameters are entered, pressing the <Calculate Profile> button will cause the graphic to be redrawn to represent the new parameters.
Dynamic Positioning
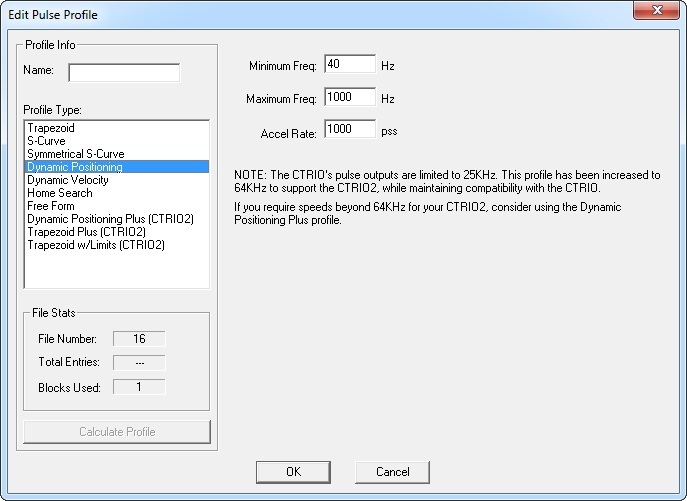 This profile defines a symmetrical (i.e. acceleration
& deceleration are the same) linear trapezoidal movement where any
number of positions can be specified on-the-fly and it is used with the
CTDYNPOS (CTRIO Run Dynamic Position
Mode) instruction. It has the following parameters:
This profile defines a symmetrical (i.e. acceleration
& deceleration are the same) linear trapezoidal movement where any
number of positions can be specified on-the-fly and it is used with the
CTDYNPOS (CTRIO Run Dynamic Position
Mode) instruction. It has the following parameters:
Minimum Freq - the frequency at which each move to position starts
Maximum Freq - the target frequency to which each move attempts to accelerate (i.e. if the acceleration rate is too slow or the position too close, this frequency may not be reached each move
Accel Rate - the rate at which the Minimum Freq will ramp up to the Maximum Freq. It is also the deceleration rate.
Dynamic Velocity
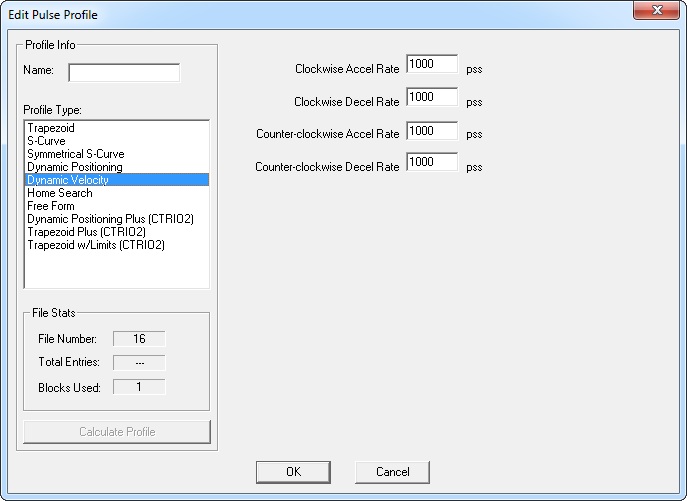 This profile defines an asymmetrical (i.e. acceleration
& deceleration can be different) linear trapezoidal movement where
any number of velocities can be specified on-the-fly and is used with
the CTDYNVEL (CTRIO Run Dynamic Velocity
Mode) instruction. It has the following parameters:
This profile defines an asymmetrical (i.e. acceleration
& deceleration can be different) linear trapezoidal movement where
any number of velocities can be specified on-the-fly and is used with
the CTDYNVEL (CTRIO Run Dynamic Velocity
Mode) instruction. It has the following parameters:
Clockwise Accel Rate - the clockwise rate at which the output will ramp up from 0 pss to the target velocity specified on-the-fly
Clockwise Decel Rate - the clockwise rate at which the output will ramp down from the previous velocity to the target velocity specified on-the-fly
Counter-clockwise Accel Rate - the counter-clockwise rate at which the output will ramp up from 0 pss to the target velocity specified on-the-fly
Counter-clockwise Decel Rate - the counter-clockwise rate at which the output will ramp down from the previous velocity to the target velocity specified on-the-fly
Home Search
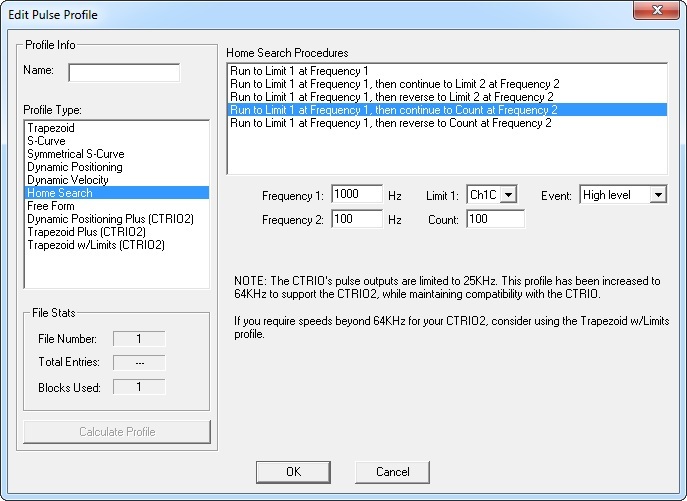 This profile defines a movement profile used to find
a home position utilizing one or more CTRIO inputs and is used with the
CTRUNPOS (CTRIO Run Position Mode)
instruction. There are no acceleration or deceleration parameters. To
use this profile it is necessary that at least one of the CTRIO inputs
(Ch1C, Ch1D, Ch2C or Ch2D) is configured as Limit
Out 0 or Limit Out 2.
It has 4 or more of the following 7 parameters:
This profile defines a movement profile used to find
a home position utilizing one or more CTRIO inputs and is used with the
CTRUNPOS (CTRIO Run Position Mode)
instruction. There are no acceleration or deceleration parameters. To
use this profile it is necessary that at least one of the CTRIO inputs
(Ch1C, Ch1D, Ch2C or Ch2D) is configured as Limit
Out 0 or Limit Out 2.
It has 4 or more of the following 7 parameters:
Home Search Procedures - there are 5 self-explanatory procedures to choose from, all with the option to designate Limit 1 and/or Limit 2 (a CTRIO Limit input) to register on the rising edge, falling edge, high level or low level signal. Limit 1 and Limit 2 can be the opposite edges of the same physical CTRIO input. For example, approaching a home sensor as rising edge of Limit 1 and Frequency 2 would carry the motion to the falling edge of the same sensor, which would be Limit 2.
Frequency 1 - starting frequency
Frequency 2 - second and last frequency that runs either to a Limit 2 event, or a specified Count
Limit 1 - Frequency 1 will run until the Event (associated with this limit) is seen. The limit is defined as Ch1C, Ch1D, Ch2C or Ch2D input
Limit 2 - if called for in the procedure chosen, Frequency 2 will run until the Event (associated with this limit) is seen. The limit is defined as Ch1C, Ch1D, Ch2C or Ch2D input
Event - always associated with either a Limit 1 or Limit 2 parameter. It can be Rising edge, Falling edge, High level or Low level
Count - if called for in the procedure chosen, indicates how many pulses will be output
Free Form
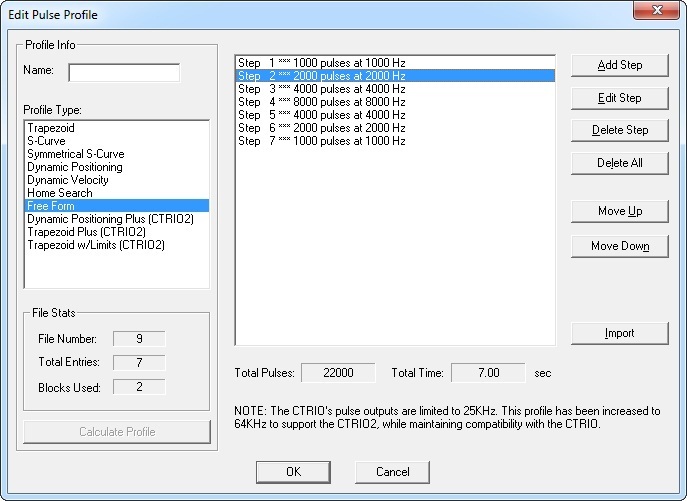 This profile defines a custom movement allowing any
number of steps each having a number of pulses to be output at a specified
frequency. It is used with the CTRUNPOS
(CTRIO Run Position Mode) instruction.
This profile defines a custom movement allowing any
number of steps each having a number of pulses to be output at a specified
frequency. It is used with the CTRUNPOS
(CTRIO Run Position Mode) instruction.
The open window in the middle of the dialog is where the custom steps are displayed.
Notice at the bottom of the window is a summary of the entire procedure giving Total Pulses and Total Time.
To add a step, press the <Add Step> button. This pulls up the Edit Pulse Entry dialog (see below).
To edit a step, press the <Edit Step> button. This pulls up the Edit Pulse Entry dialog (see below).
To delete a step, select the step in the window, and press the <Delete Step> button.
To delete all steps, press the <Delete All> button.
To move a particular step up or down in the list, select the step in the window, and press the <Move Up> or <Move Down> button.
Pressing the <Import> button allows the reading of pulse count/frequency pairs from a selected .CSV (comma separated variable) file. All existing steps are overwritten. The .CSV file data should be formated as comma separated pairs, one per line, and contain a maximum of 256 steps. For example the text should be formatted like this:
Count_1,Freq_1
Count_2,Freq_2
...
Count_n,Freq_n
For the procedure shown in the picture, the file would look like this:
1000,1000
2000,2000
4000,4000
8000,8000
4000,4000
2000,2000
1000,1000
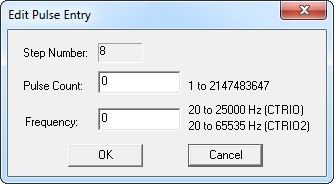 The Edit Pulse Entry dialog is where a new Free Form
step is created or edited.
The Edit Pulse Entry dialog is where a new Free Form
step is created or edited.
Step Number - the step number being edited, or it is automatically selected if creating a new step.
Pulse Count - the number of pulses to be output by this step
Frequency - the frequency of the pulses to be output by this step
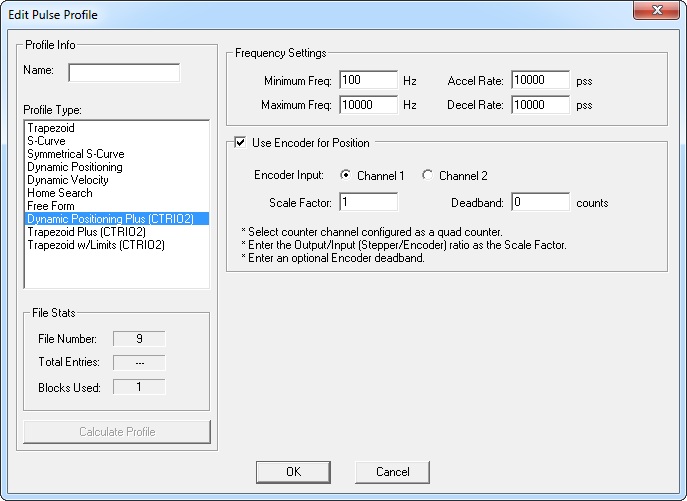
Dynamic Positioning Plus (CTRIO2)
 This profile defines an asymmetrical (i.e. acceleration
& deceleration can be different) linear trapezoidal movement where
any number of positions can be specified on-the-fly with the additional
option of using a quadrature encoder attached to the CTRIO2 input channel
to provide the position. It is used with the CTDYNPOS
(CTRIO Run Dynamic Position Mode) instruction. It has the following
parameters:
This profile defines an asymmetrical (i.e. acceleration
& deceleration can be different) linear trapezoidal movement where
any number of positions can be specified on-the-fly with the additional
option of using a quadrature encoder attached to the CTRIO2 input channel
to provide the position. It is used with the CTDYNPOS
(CTRIO Run Dynamic Position Mode) instruction. It has the following
parameters:
Minimum Freq - the frequency at which each move to position starts
Maximum Freq - the target frequency to which each move attempts to accelerate (i.e. if the acceleration rate is too slow or the position too close, this frequency may not be reached each move
Accel Rate - the rate at which the Minimum Freq will ramp up to the Maximum Freq.
Decel Rate - the rate at which the Maximum Freq (if reached) will ramp down to the Minimum Freq.
Optionally, if one of the CTRIO inputs is configured as Quad counter, it is possible to get the feedback position from that input instead of just outputting a number of pulses. To select this option, Use Encoder for Position is checked. It has the following parameters:
Encoder Input - either Channel 1 or Channel 2 is chosen for encoder position feedback.
Scale Factor - This is the output to input resolution (stepper/encoder) ratio. In other words, if the stepper motor being used is a 1000 ppr (pulses per revolution) and the encoder is 800 ppr, then the scale factor would be 1000/800 = 1.25.
Deadband - the number of position counts away from the target position that causes no action. It is "slop" in the machine and can reduce "hunting" or "ringing" as the profile attempts to get to the target position.
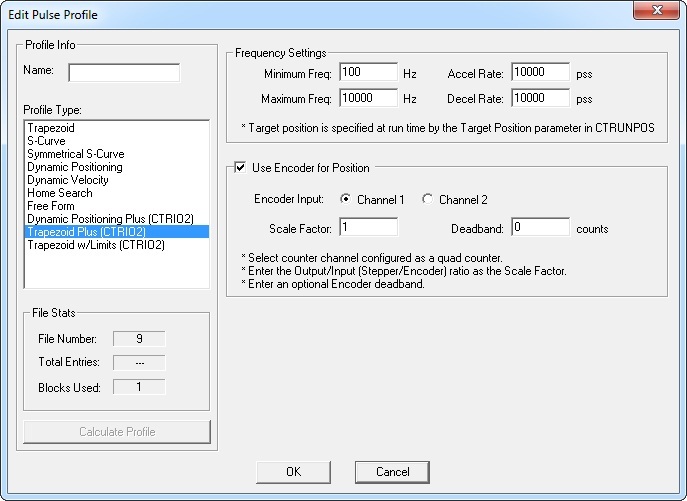
Trapezoid Plus (CTRIO2)
 This profile defines an asymmetrical (i.e. acceleration
& deceleration can be different) linear trapezoidal movement to a
target position parameter provided at runtime by the CTRUNPOS
instruction with the additional option of using a quadrature encoder attached
to the CTRIO2 input channel to provide the position. Used with the CTRUNPOS (CTRIO Run Position Mode) instruction.
It has the following parameters:
This profile defines an asymmetrical (i.e. acceleration
& deceleration can be different) linear trapezoidal movement to a
target position parameter provided at runtime by the CTRUNPOS
instruction with the additional option of using a quadrature encoder attached
to the CTRIO2 input channel to provide the position. Used with the CTRUNPOS (CTRIO Run Position Mode) instruction.
It has the following parameters:
Minimum Freq - the frequency at which each move to position starts
Maximum Freq - the target frequency to which each move attempts to accelerate (i.e. if the acceleration rate is too slow or the position too close, this frequency may not be reached each move
Accel Rate - the rate at which the Minimum Freq will ramp up to the Maximum Freq.
Decel Rate - the rate at which the Maximum Freq (if reached) will ramp down to the Minimum Freq.
Optionally, if one of the CTRIO inputs is configured as Quad counter, it is possible to get the feedback position from that input instead of just outputting a number of pulses. To select this option, Use Encoder for Position is checked. It has the following parameters:
Encoder Input - either Channel 1 or Channel 2 is chosen for encoder position feedback.
Scale Factor - This is the output to input resolution (stepper/encoder) ratio. In other words, if the stepper motor being used is a 1000 ppr (pulses per revolution) and the encoder is 800 ppr, then the scale factor would be 1000/800 = 1.25.
Deadband - the number of position counts away from the target position that causes no action. It is "slop" in the machine and can reduce "hunting" or "ringing" as the profile attempts to get to the target position.
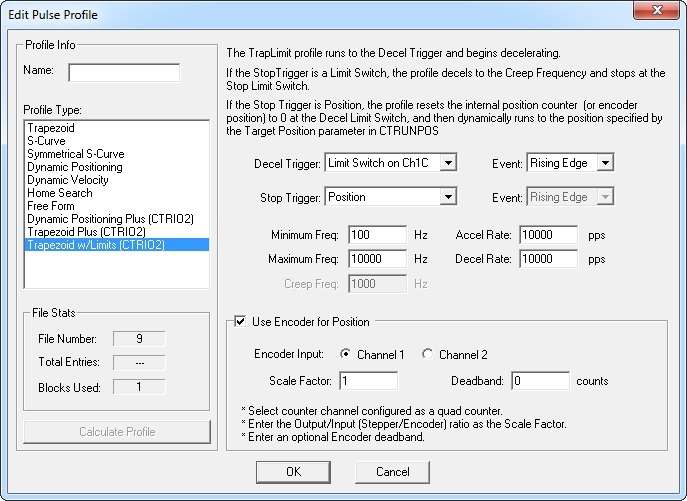
Trapezoid w/Limits (CTRIO2)
 This profile defines an asymmetrical (i.e. acceleration &
deceleration can be different) linear trapezoidal movement to a deceleration
trigger (a CTRIO2 input) and then to a stop trigger (a position or a CTRIO2
input) with the additional option of using a quadrature encoder attached
to the CTRIO2 input channel to provide the position. Used with the CTRUNPOS (CTRIO Run Position Mode) instruction.
To use this profile it is necessary that at least one of the CTRIO2 inputs
(Ch1C, Ch1D, Ch2C or Ch2D) is configured as Limit
Out 0 or Limit Out 2.
The detailed functionality is described at the top of the dialog itself.
It has the following parameters:
This profile defines an asymmetrical (i.e. acceleration &
deceleration can be different) linear trapezoidal movement to a deceleration
trigger (a CTRIO2 input) and then to a stop trigger (a position or a CTRIO2
input) with the additional option of using a quadrature encoder attached
to the CTRIO2 input channel to provide the position. Used with the CTRUNPOS (CTRIO Run Position Mode) instruction.
To use this profile it is necessary that at least one of the CTRIO2 inputs
(Ch1C, Ch1D, Ch2C or Ch2D) is configured as Limit
Out 0 or Limit Out 2.
The detailed functionality is described at the top of the dialog itself.
It has the following parameters:
Decel Trigger - the profile starts at the Minimum Freq and accelerates at the Accel Rate toward the Maximum Freq until it reaches this trigger, at which point, the profile begins deceleration at the Decel Rate. This trigger is defined as:
Limit Switch on Ch1C
Limit Switch on Ch1D
Limit Switch on Ch2C
Limit Switch on Ch2D
Event - always associated with either a the Decel Trigger or Stop Trigger parameter. It can be Rising edge, Falling edge or Both edges
Stop Trigger - can be either a position or a limit switch. If it is a limit, the profile, after reaching the Decel Trigger event, decelerates at the Decel Rate to the Creep Freq and stops at the stop trigger limit event. If it is configured as a position, the profile resets the position counter (or encoder feedback position) to zero (0) at the Decel Trigger event and then runs to the position specified by a parameter in the CTRUNPOS instruction. This trigger is defined as:
Limit Switch on Ch1C
Limit Switch on Ch1D
Limit Switch on Ch2C
Limit Switch on Ch2D
Position
Optionally, if one of the CTRIO2 inputs is configured as Quad counter, and the Stop Trigger is configured as Position, it is possible to get this feedback position from that input instead of just outputting a number of pulses. To select this option, Use Encoder for Position is checked. It has the following parameters:
Encoder Input - either Channel 1 or Channel 2 is chosen for encoder position feedback.
Scale Factor - This is the output to input resolution (stepper/encoder) ratio. In other words, if the stepper motor being used is a 1000 ppr (pulses per revolution) and the encoder is 800 ppr, then the scale factor would be 1000/800 = 1.25.
Deadband - the number of position counts away from the target position that causes no action. It is "slop" in the machine and can reduce "hunting" or "ringing" as the profile attempts to get to the target position.